Actuators, Free Full-Text
4.5 (682) · € 27.00 · En Stock
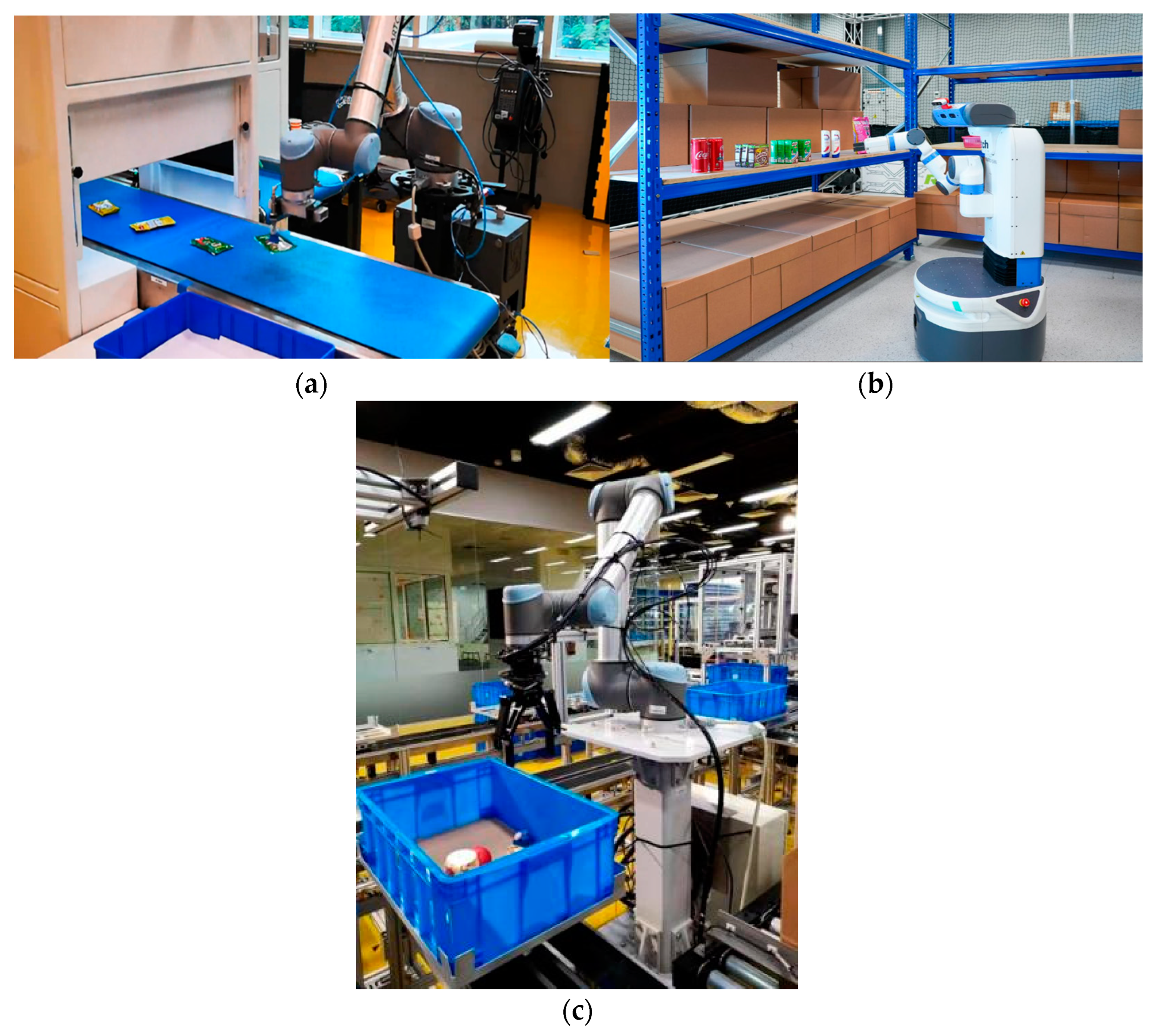
Industries such as the manufacturing or logistics industry need algorithms that are flexible to handle novel or unknown objects. Many current solutions in the market are unsuitable for grasping these objects in high-mix and low-volume scenarios. Finally, there are still gaps in terms of grasping accuracy and speed that we would like to address in this research. This project aims to improve the robotic grasping capability for novel objects with varying shapes and textures through the use of soft grippers and data-driven learning in a hyper-personalization line. A literature review was conducted to understand the tradeoffs between the deep reinforcement learning (DRL) approach and the deep learning (DL) approach. The DRL approach was found to be data-intensive, complex, and collision-prone. As a result, we opted for a data-driven approach, which to be more specific, is PointNet GPD in this project. In addition, a comprehensive market survey was performed on tactile sensors and soft grippers with consideration of factors such as price, sensitivity, simplicity, and modularity. Based on our study, we chose the Rochu two-fingered soft gripper with our customized force-sensing resistor (FSR) force sensors mounted on the fingertips due to its modularity and compatibility with tactile sensors. A software architecture was proposed, including a perception module, picking module, transfer module, and packing module. Finally, we conducted model training using a soft gripper configuration and evaluated grasping with various objects, such as fast-moving consumer goods (FMCG) products, fruits, and vegetables, which are unknown to the robot prior to grasping. The grasping accuracy was improved from 75% based on push and grasp to 80% based on PointNetGPD. This versatile grasping platform is independent of gripper configurations and robot models. Future works are proposed to further enhance tactile sensing and grasping stability.

Lead-free KNNLT piezoceramic multilayer actuators with Ni electrodes cofired under low oxygen partial pressure - ScienceDirect
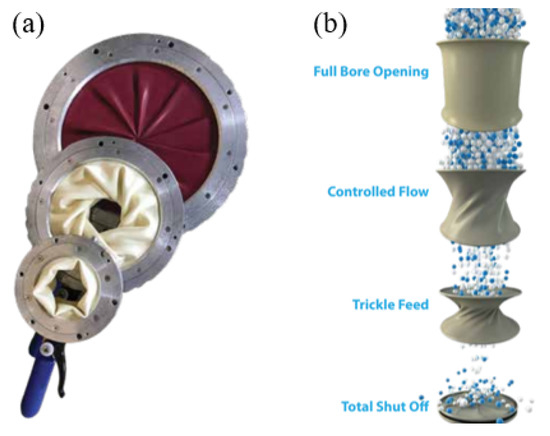
Trickle Feed Mechanism Software - Colaboratory

Pftc Lms Download Page - Colaboratory
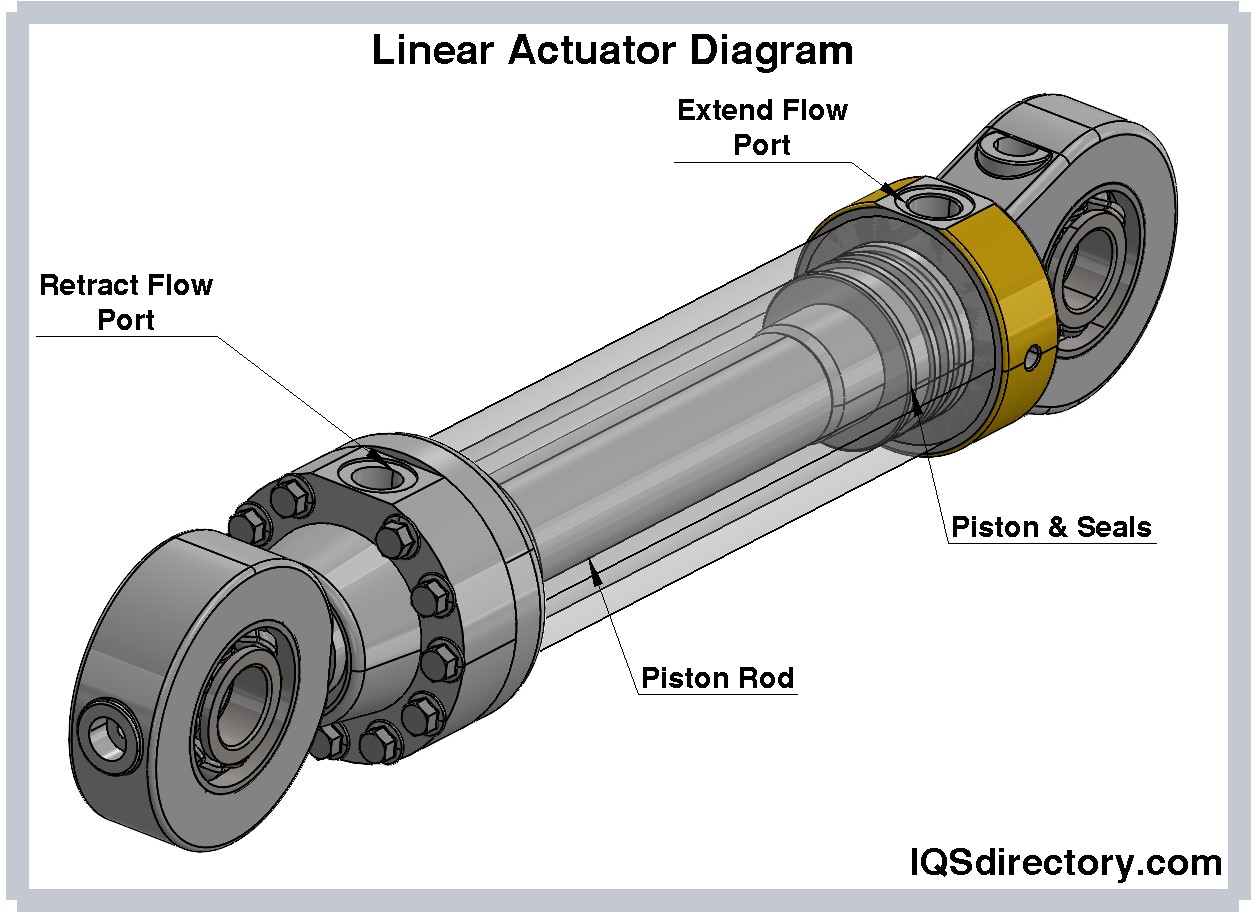
12 Volt Linear Actuators: Types, Uses, Features and Benefits
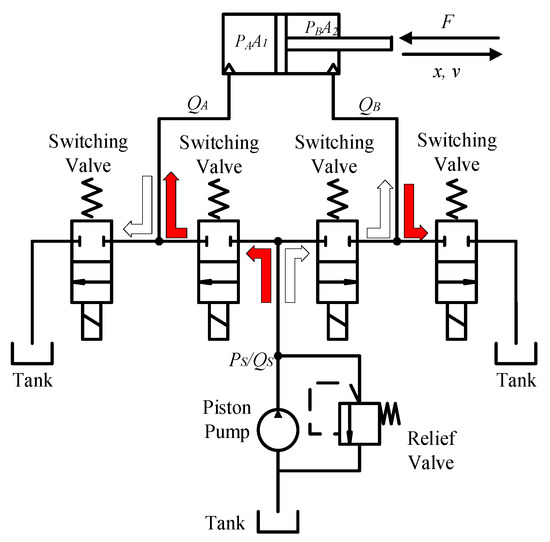
Hydraulic Control Systems Merritt Pdf - Colaboratory

Self-Healing Polymeric Soft Actuators

PDF) Study of a pseudo-empirical model approach to characterize plasma actuators
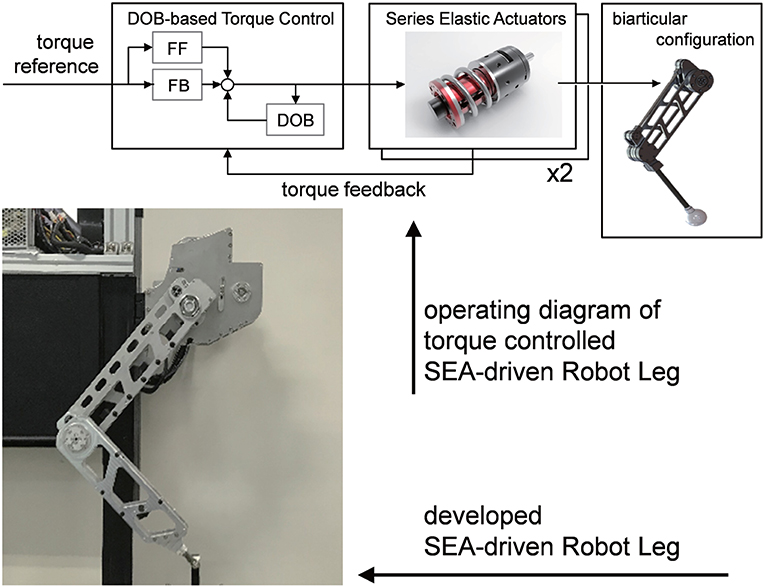
Frontiers Development, Analysis, and Control of Series Elastic Actuator-Driven Robot Leg
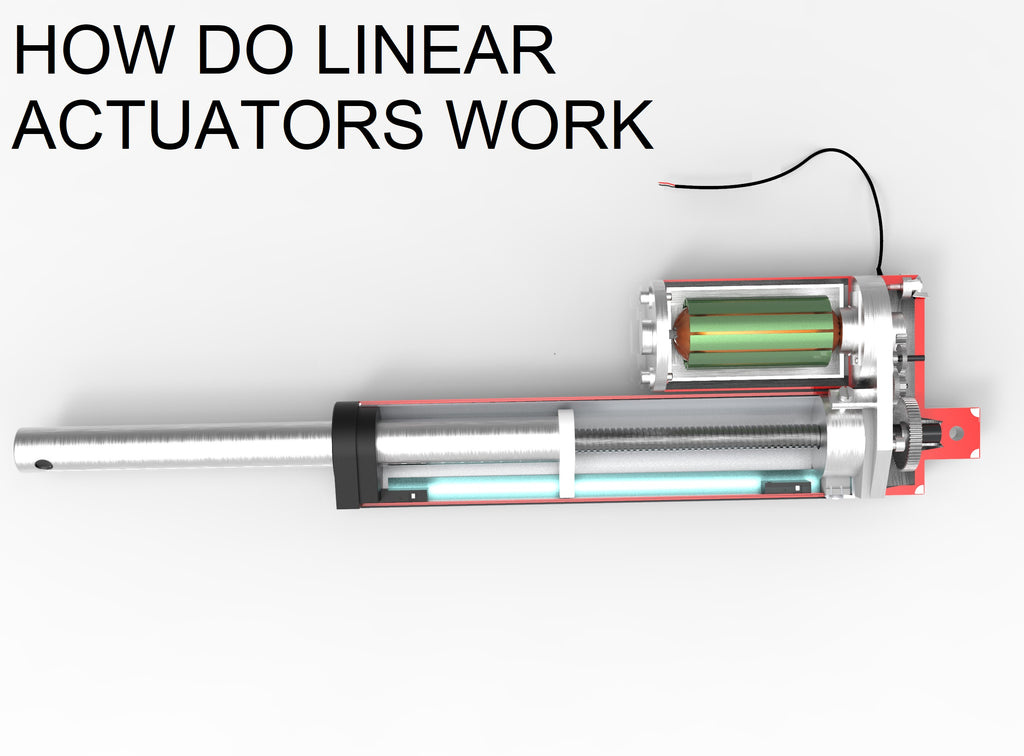
How Does a Linear Actuator Work?

Polymeric Actuators
Full Envelope Reconfigurable Control Design for the X-33 Vehicle : Cotting, M. Christopher : Free Download, Borrow, and Streaming : Internet Archive

SENSORS & ACTUATORS KEY TECHNOLOGY FOR INTELLIGENT ENGINE CONTROL
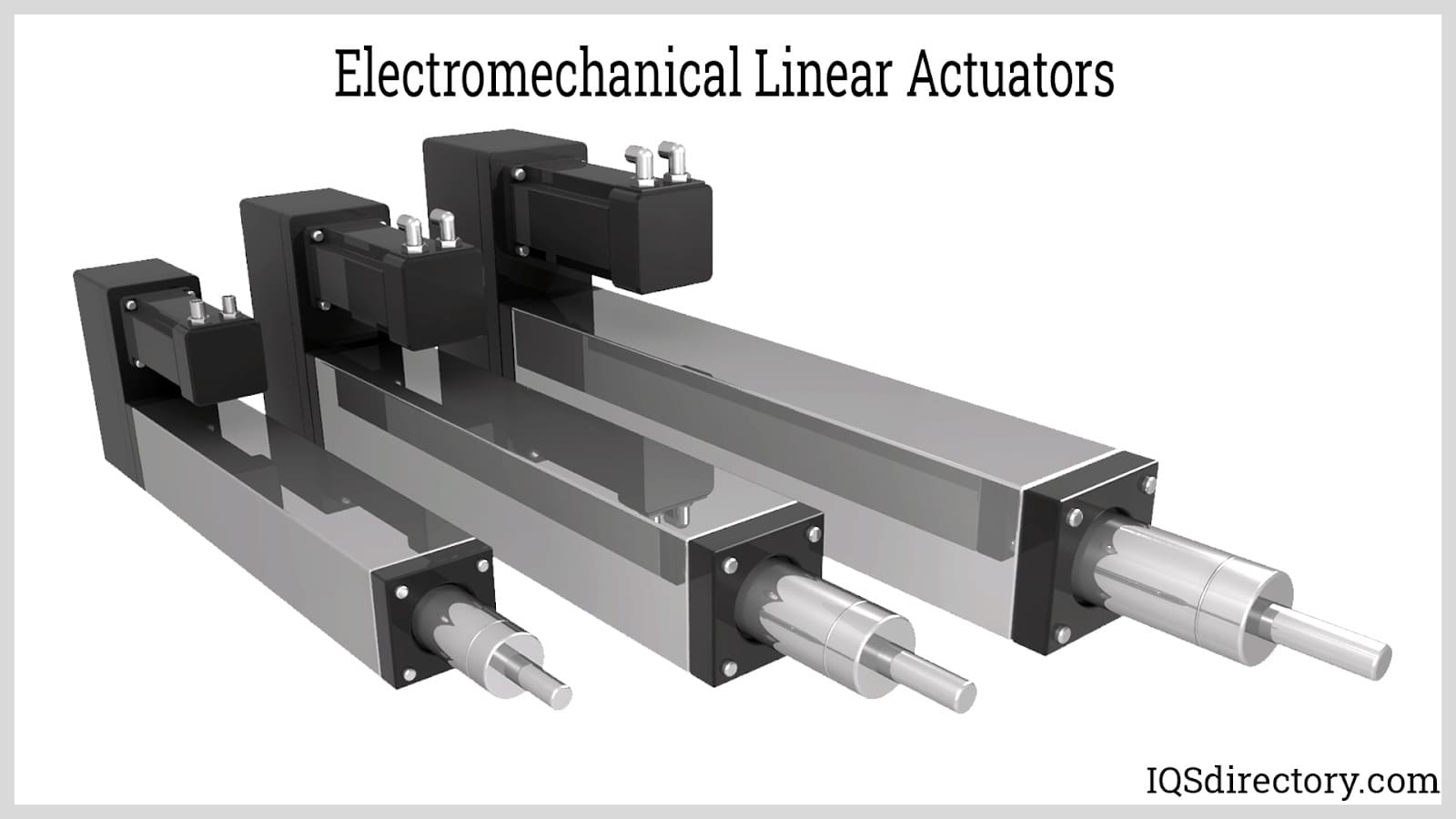
Linear Actuator: What Is It? How Does It Work? Types Of











